惑星探査ローバのお話し
本記事はJAXA 学生 Advent Calendar 2021の20日目の記事です.
とある日の会話
「何の研究されているのですか?」
「惑星探査ローバのナビゲーションについてです.ローバの遠隔操作はほとんど不可能なので,自律走行が求められます.自律走行するために行う一連の処理をナビゲーションというのですが,僕はその機能の高性能化について研究をしています.」
「ローバって何ですか?」
!!!
そうだ,それはそうだ.
自分は中学生の頃からロボットをいじり,その過程で「ローバ」というワードを無意識のうちに知り使ってきました.
一方でロボットについて詳しく知らない人にとってはローバというワードすら聞いたことないはずです.
というわけで,今回の記事ではローバとは何なのかを皆さんにも知っていただくために,これまでの宇宙探査で活躍してきた探査ローバ,そしてこれから活躍するであろう探査ローバについてまとめていきたいと思います.
宇宙探査の手法
まず,ローバとは何なのかについてお話しする前に,宇宙探査の手法について俯瞰してみたいと思います.
宇宙探査には大きく分けて4種類の方法があります.1
- フライバイ
- オービタ
- ランダ
- ローバ
まずはこれらについて解説しましょう.
フライバイ(Fly-by)
フライバイはその名の通り探査対象の天体の近くを通過する際に探査を行う手法です.通り過ぎるだけなので,通過中の数時間~数日,短いと数分間のみしか探査を行えません.
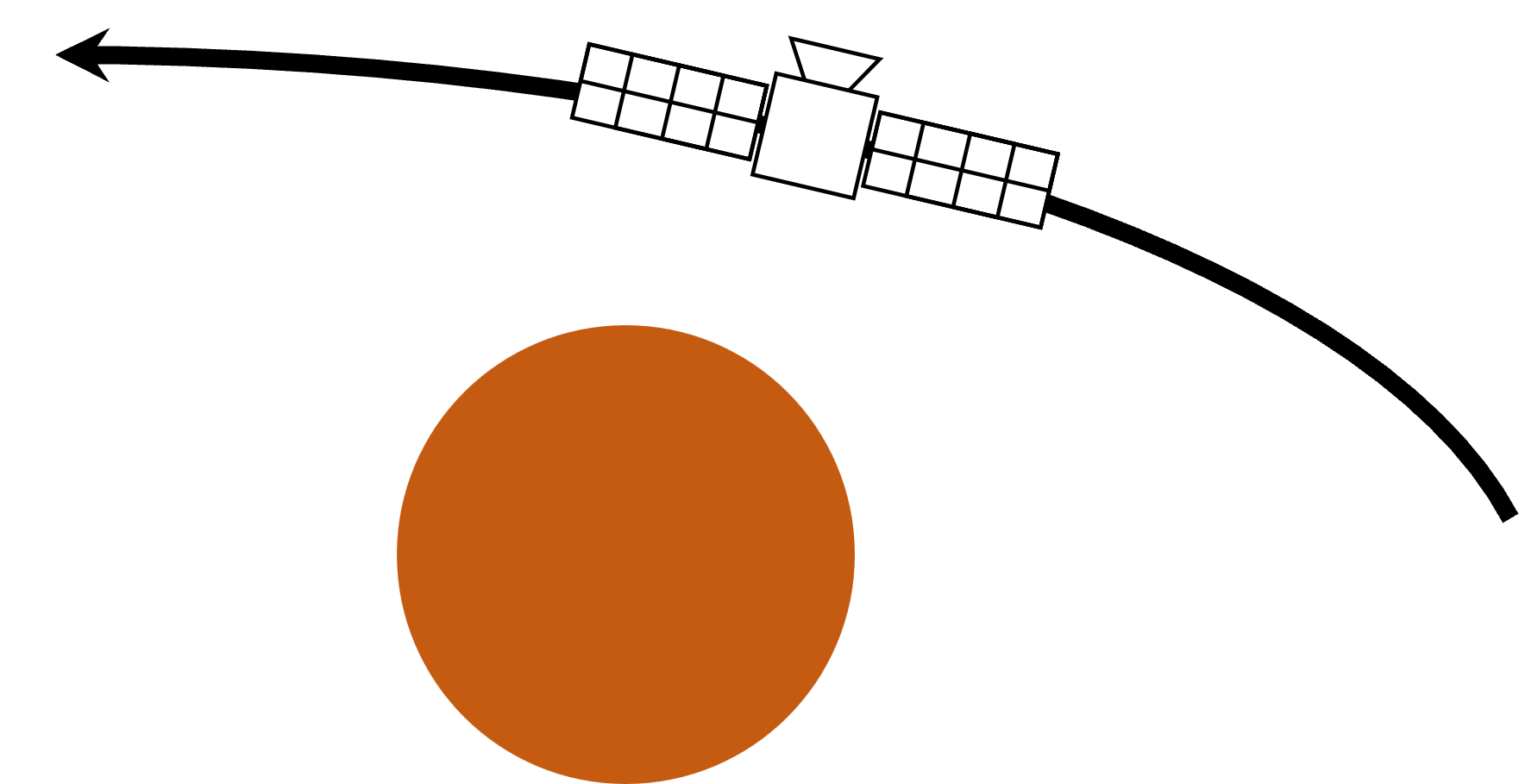
Fly-by
オービタ(Orbiter)
オービタは対象天体の重力圏内に留まり,周回軌道上で探査を行う手法です.
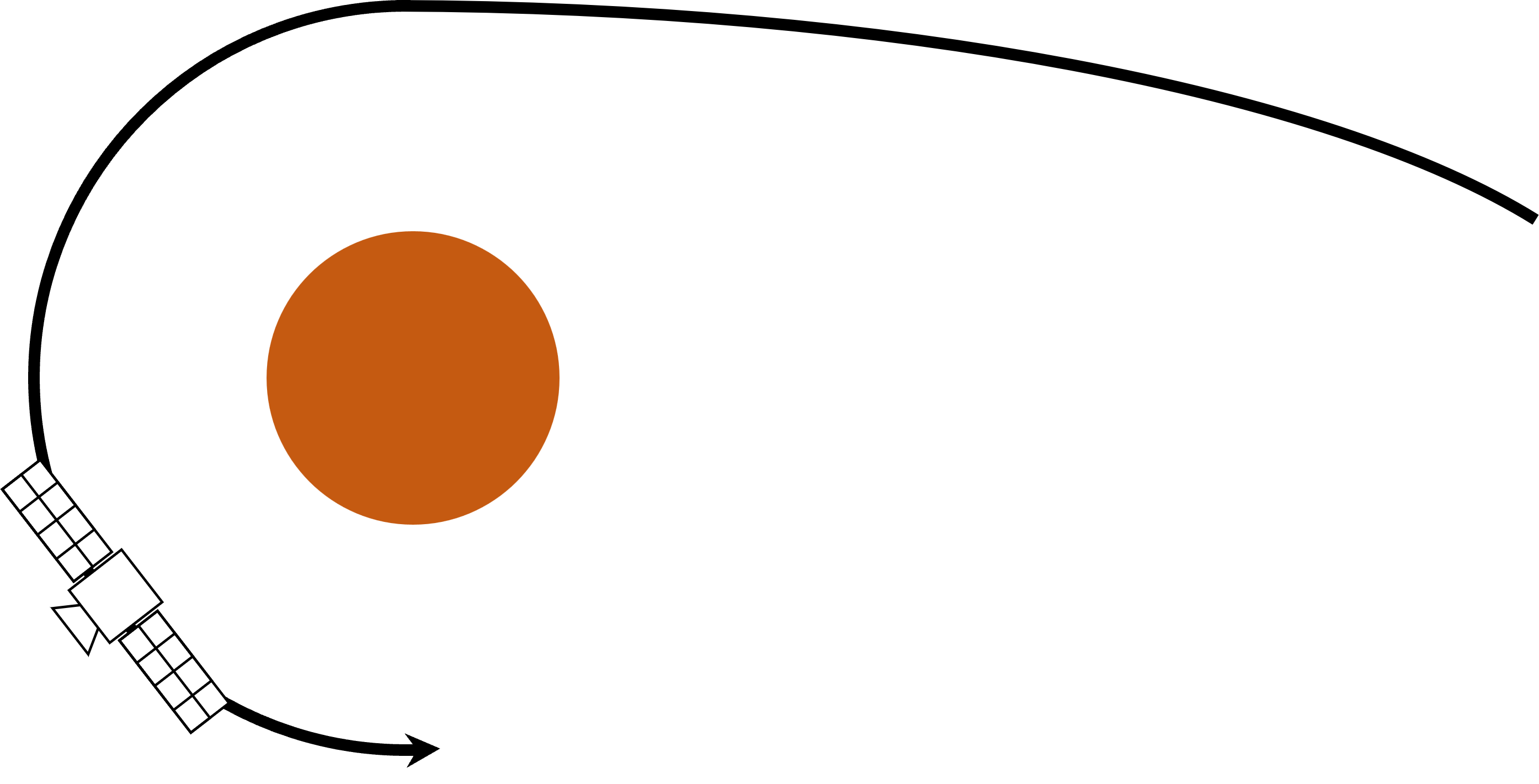
Orbiter
ランダ(Lander)
ランダは対象天体に接近したうえでその表面に着陸し,探査を行う手法です.天体表面を直接探査することができるため,非常に多くの科学的データを得ることができます.一方,天体表面への着陸は非常にリスクが高く,失敗する確率も高い手法です.
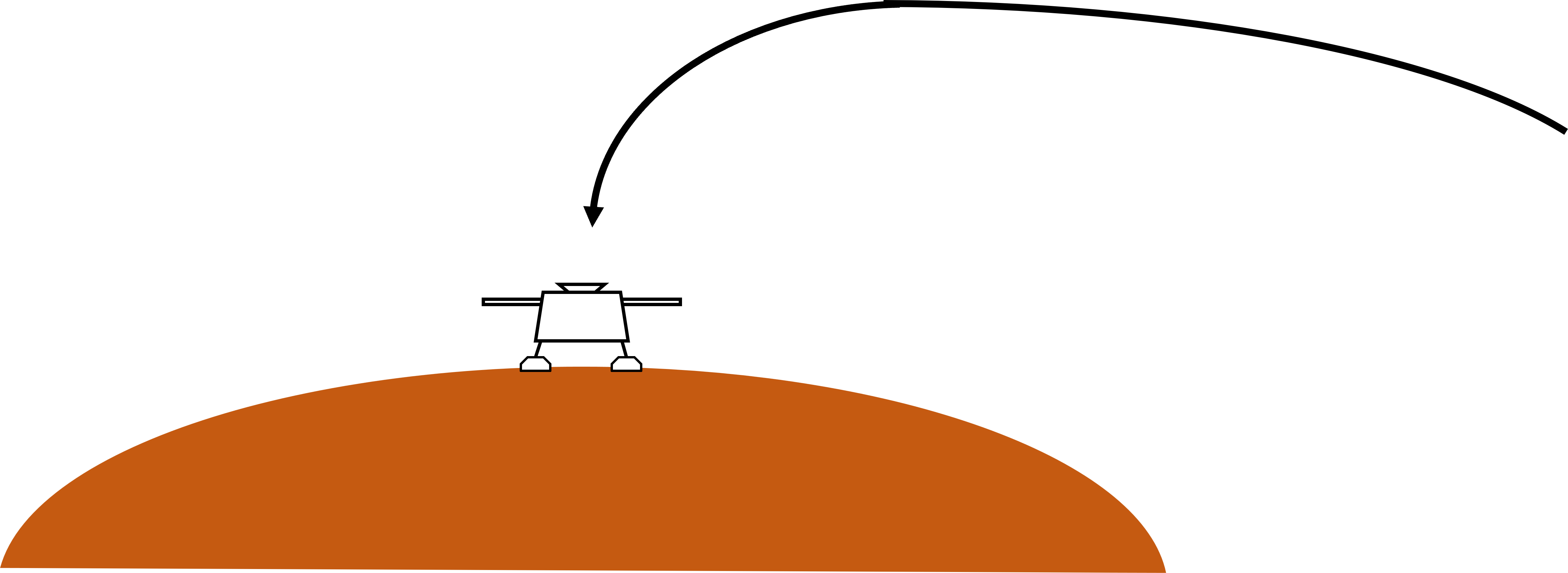
Lander
ローバ(Rover)
ローバは,ランダに移動機構を付け,天体表面を移動する探査手法です.天体表面を直接探査することができる,そして移動により広範囲にわたって探査することができることから最も科学的成果を得ることができる手法です.
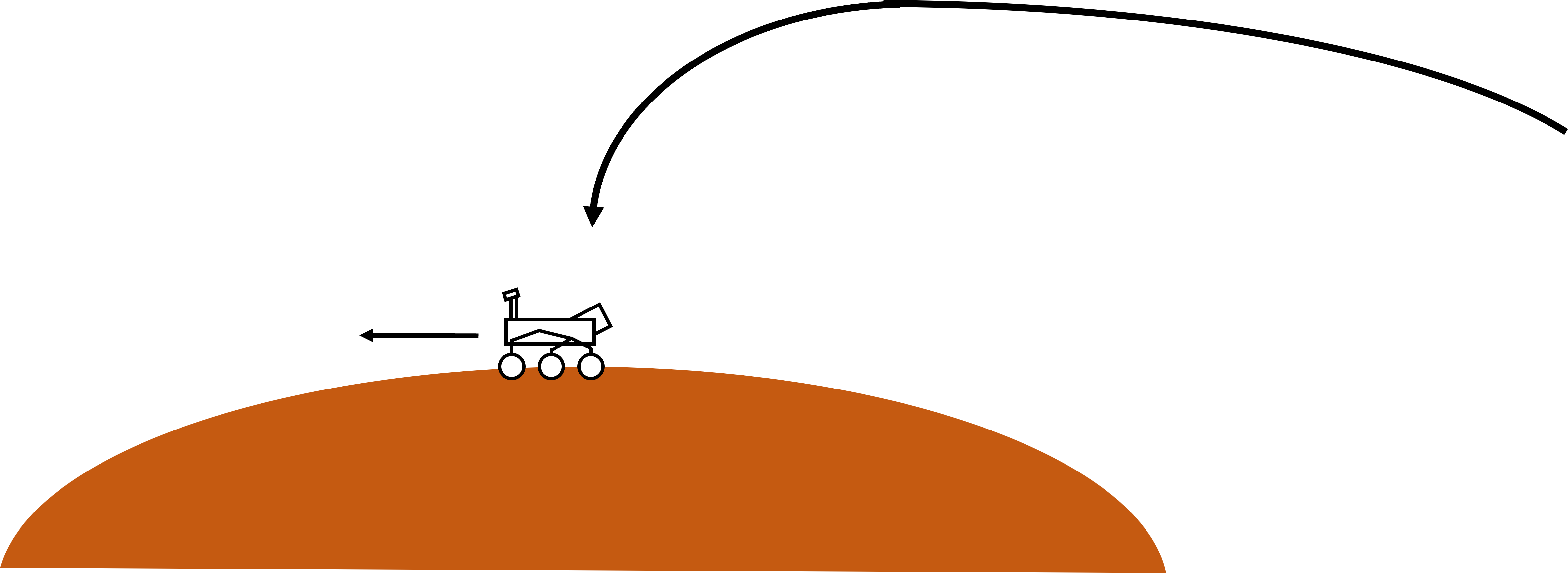
Rover
以上,4つの探査手法を紹介しましたが,ローバの利点を改めて列挙すると以下の2点です.
- 天体表面の探査対象を手に取るように観測・分析することができる
- 移動により広範囲の探査を行うことができる
フライバイやオービタは天体の軌道上から観測することになるため得られる情報が限られています.例えば,今火星軌道上にあるMROというオービタにはHiRISEというカメラが搭載されています.宇宙機搭載のカメラのなかでは最高性能で火星表面を25cmの分解能で撮影することができますが,得られる情報は地形,地質や岩石分布に限られます.一方でローバは天体表面に降り立つことで,観測対象をセンチメートル,場合によってはミリメートル,マイクロメートルのオーダーで観測することができ,岩石組成や元素分析を行うことが可能です.
また,ローバはランダにはない移動機構があります.同じ場所に限らず,様々な地点で詳細な探査を行うことで比較分析を行うことが可能です.探査開始後に科学的に興味ある地点(ROI2)を見つけた場合もその地点まで移動することで追加で探査を行うといったことも可能です.
本記事では月,火星で活躍してきたローバを紹介していきます.
月
月は地球に最も近い天体ということもあり,宇宙開発の早い段階から探査が進められてきました.1969年にアポロ11号によって人間が月表面にたどり着いたことで,月に関する科学データが多く得られ,土壌サンプルも大量に収集することができています.そのため,ローバの活動は月から火星へとシフトしています.
過去・現在の月探査ローバ
ルノホート1, 2号(ソビエト連邦;1970,1973)
- ミッション名:ルノホート
- サイズ:-/-
- 質量:-/-
旧ソ連が開発した月探査ローバで,世界で初めて地球以外の天体に着陸した遠隔操作型ローバです.
Lunar Roving Vehicle(NASA;1971~1972)
- ミッション名:アポロ
- サイズ:3.1m x 2.3m x 1.14 m
- 質量:210kg
Lunar Rovin Vehicle(LRV) ©NASA
アポロ15~17号のミッションで用いられた有人月探査ローバです.人が乗るローバとしては今も含め唯一のもので,宇宙飛行士自身がローバを操縦します.このローバが導入されたことで,ミッション中の行動範囲が大幅に拡大し,アポロ17号のミッションでは計35.9㎞走行しました.
玉兎(CNSA;2013)
- ミッション名:嫦娥3号
- サイズ:高さ1.5m
- 質量:120kg
嫦娥3号は中国初の月軟着陸に成功したミッションであり,また1976年のルナ24号(ソ連)以降初となる月着陸ミッションでした.
玉兎2号(CNSA;2018)
- ミッション名:嫦娥4号
- サイズ:-
- 質量:-
世界初となる月の裏側への着陸に成功したミッションです.月の裏側に行くと月そのものが障壁となり通信を行うことができなくなりますが,中継地点を設けることで回線を確保しています.
これからの月惑星探査ローバ
私はこれからの月探査は以下の2点に分かれると考えています.
- 「行ける場所」から「行きたい場所へ」の探査
- ビジネスとしての月探査
「行きたい場所へ」の月探査
これまでの月探査は「行ける場所」,すなわち着陸しやすく走行しやすい平坦な場所を対象として行われてました.
一方で科学的に豊富なデータを獲得できるのは以下のような場所です.
- 斜面・断層などの地層が見える場所
- クレータなどの深い地層が見える場所
- 縦穴・洞窟など太陽風化の影響を受けていない場所
- 氷が残っているとされている極域
このような場所は宇宙探査機にとっては着陸が困難です.また表面を移動するローバにとっては高度な走破性が求められ,縦穴・洞窟・極域などは光が全く入らないことがあり環境認知が困難です.光が入らないことから太陽電池によるエネルギー補充も困難です.
以上のような要求から,「行きたい場所へ」の探査ローバに必要な技術は以下のような内容であり,盛んに研究が行われています.
- 特異な地形に着陸できる機構,また対応できる柔軟な走破性機構
- 周囲環境の認知が難しい光環境でも走行できるナビゲーションシステム
- 少ないエネルギーによる効率的な走行・探査,または太陽電池によらないエネルギー源
ここでは「行きたい場所へ」の探査を実現するローバを一つ紹介します.
Moon Ranger(カーネギーメロン大学)
Moon Ranger
月極域を探査するためにカーネギーメロン大学が研究・開発中のローバです.
太陽光パネルが側面を向いているのが特徴的ですが,これは月極域では太陽光が真横から入るためです.太陽光が上から照らされないため,地面のほとんどが影となり地形を判別できないことが考えられます.そのような場面を想定し,カーネギーメロン大学では地面にレーザー光をあて,その形状から地形を推定する研究を行っています.
月探査ビジネス
2020年10月にJAXAがアルテミス計画への参画を決定し,萩生田文科大臣(当時)とNASAのジム・ブライデンスタイン長官(当時)が月探査協力に関する文部科学省と米航空宇宙局の共同宣言に署名されました.アポロ計画以降となる有人月探査が始まりつつあります.
アルテミス計画は月探査を行うだけではなく,その先の有人火星探査や人類の月面での持続的な活動を目標としています.そのためこれまでの月探査は公的機関のみが行ってましたが,民間企業も月面での活動に参画し,ビジネスを展開しようとしています.今後の月探査はそのようなビジネスの一部として行われることもあるかもしれません.
ここでは月探査ビジネスを想定し民間企業が開発している月探査ローバを紹介します.
HAKUTO-R(ispace)
(執筆中)
ルナ・クルーザー(JAXA, トヨタ自動車)
(執筆中)
火星
火星は探査回数が月の次に多く,これまでに活動したローバ数も最も多い天体です.その理由としては以下の2点が挙げられます.
- 地球のすぐ外側を周回する比較的近い天体であること
- 生命が存在する3条件を満たす「ハビタブルな天体」であること3
すなわち生命の痕跡や生命そのものを見つける可能性があり,得られる科学的知見の期待値が高いということです.
これまでに計6台のローバ,2021年現在もなお3台のローバが活動中です.
過去・現在の火星探査ローバ
Sojourner(NASA;1998)
- ミッション名:Mars Path Finder
- サイズ:-
- 質量:-
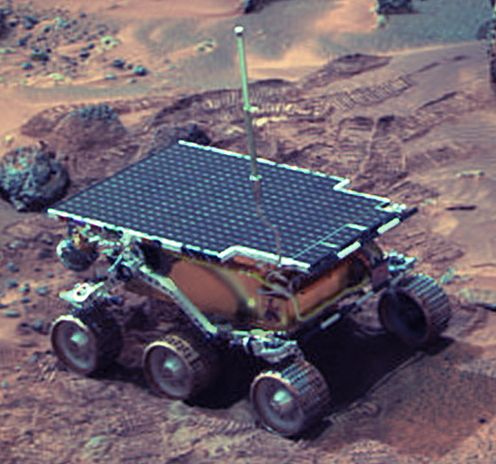
Sojourner(Image Credit:NASA)
世界初の火星探査ローバです.タイヤが合計6輪ありますが,これはロッカー・ボギー機構と言われるもので,凹凸が激しい地形でも6輪すべてのタイヤを接地させることで走破性を高める効果があります.以降のNASAの探査ローバでも用いられる機構です.
地球にいるオペレータからの指令に基づき最大毎分40cmの速度で走行が可能です.最小限のナビゲーション機能として障害物回避が搭載されていますが,基本的にはゴーアンドストップ方式で移動します.
観測機器としてXセンスペクトロメータ(APXS)を搭載しており,火星の岩石の元素分析を行うことが可能です.
Spirit, Opportunity(NASA;2004~2011, 2004~2018)
- ミッション名:Mars Exploration Rover
- サイズ:2.3m x 1.6m x 1.5m
- 質量:185kg
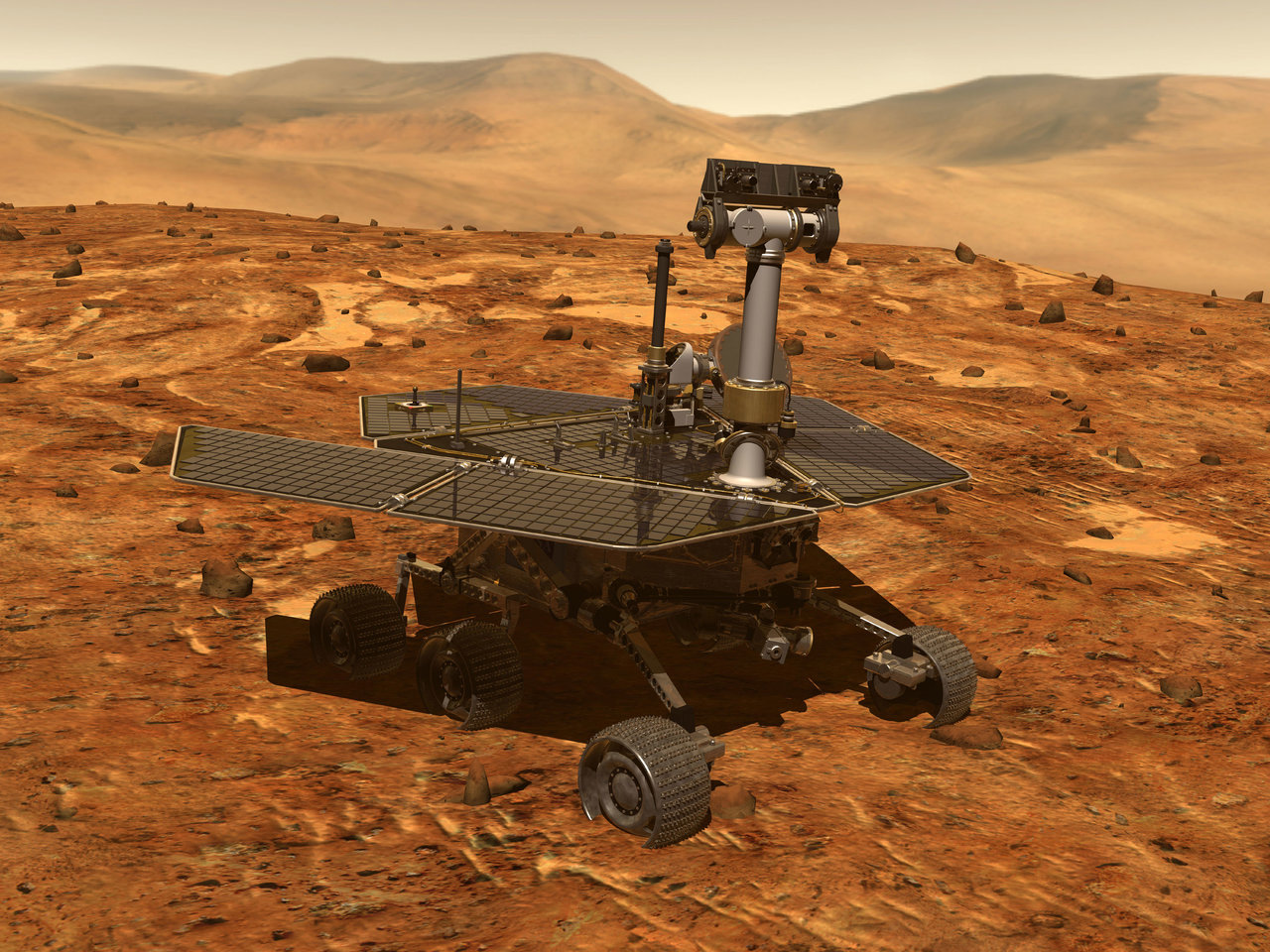
Spirit (Image Credit:NASA)
Mars Exploration RoverではSpiritとOpportunityの2台のローバが送り込まれました.
観測機器が限られていたSojournerとは異なり,分光計や掘削機構などの豊富な科学観測機器が搭載されています.特に人間の腕に相当するロボットアームを用いることで調査対象のサンプルを直に観測することも可能となりました.
Spiritは2009年11月に車輪が砂にはまり身動きできなくなりました.翌3月,火星の冬のため発電量を確保できなくなり,通信途絶し運用を終了しました4. Opportunityは2018年6月に発電量低下に伴い通信が途絶し翌2月に運用を終了しました5.Opportunityは運用終了までにフルマラソンを超える約45kmに及ぶ距離を走行し,この記録はこれまでの月・惑星探査ローバの走行距離の中で最長です(2位はルノホート2号の約39㎞).
Curiosity(NASA;2012~)
- ミッション名:Mars Science Laboratory
- サイズ:3m x 2.7m x2.2m
- 質量:899kg
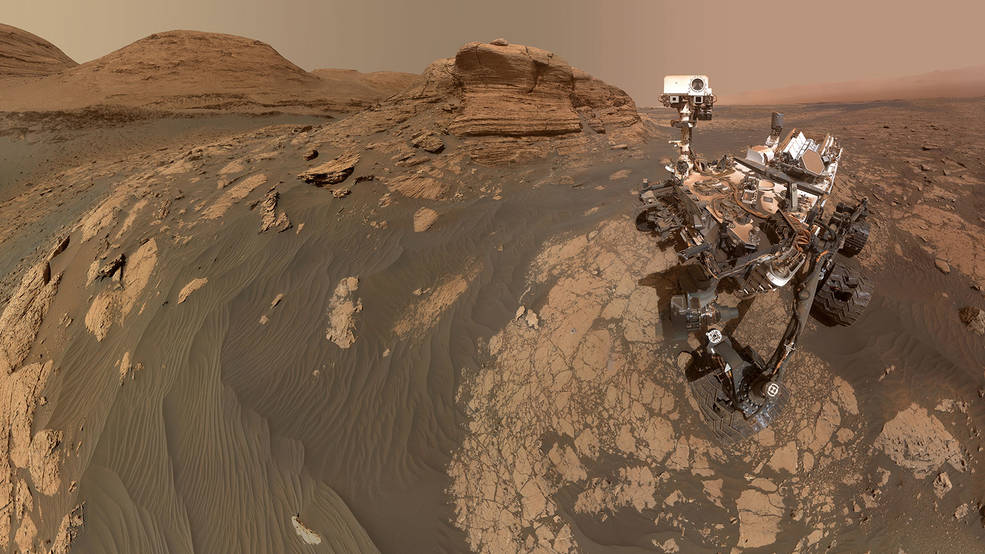
Curiosity(Image Credit:NASA/JPL)
火星に送り込まれたローバとしては最大規模であり,搭載されている測定装置も膨大です.また探査ローバとして初めてRTG(Radioistope Thermoelectric Generator)が搭載されており,エネルギー問題も大幅に解消されています(それでも走行中は消費電力のほうが上回ります).
Curiosityは2021年現在も運用中です.
Curiosityの探査成果の1つに下の画像があります.
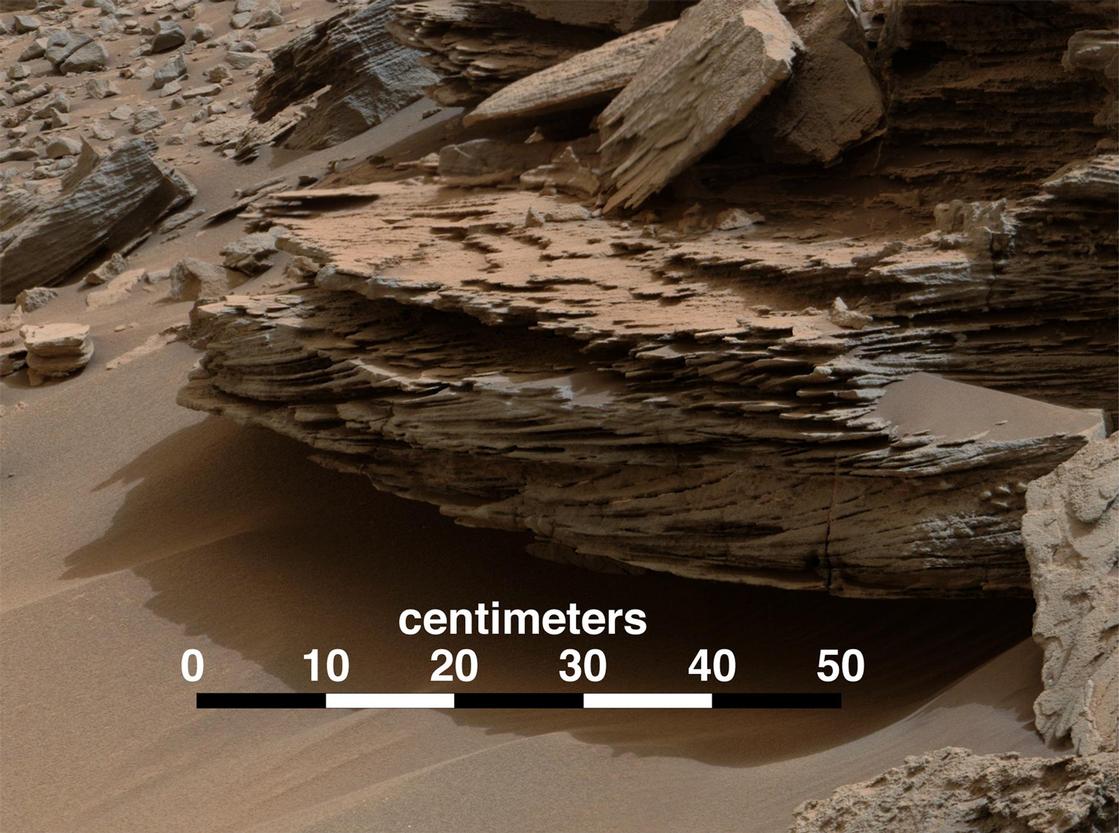
Image captured by Curiosity on sol 690 (Image Credit:NASA/JPL-caltech/MSSS)
なんてことない岩の写真に見えますが,岩に入っている横方向の線の角度が上側と下側でわずかに異なります.これは地質学の用語で斜交層理と言われるもので,かつて液体が流れていたという重要な証拠です.火星にかつて水が存在していた可能性が高まったという点で,Curiosityによる探査で得られた重要な成果です.
Perseverance(NASA;2021~)
- ミッション名:Mars 2020
- サイズ:2.9m x 2.8m x 2.2m
- 質量:1025kg
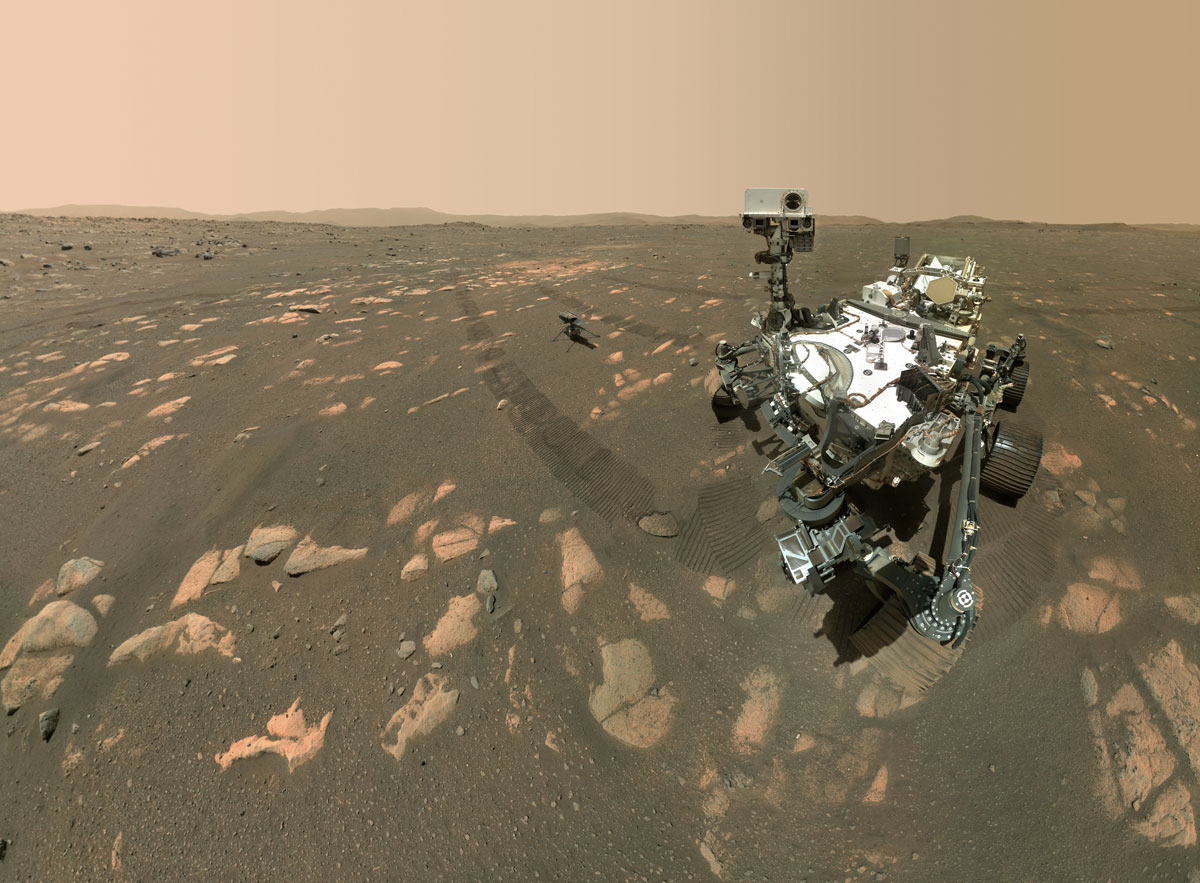
Perseveranceと火星ヘリコプタIngenuity(Image Credit:NASA/JPL)
Perseveranceは生命の痕跡を探ることを主テーマとし,2021年2月に火星に送り込まれました.着陸地点はジェゼロクレーターといわれる場所です.こちらはクレータの中に過去に水が流れていた可能性を示唆する三角州があり,生命の痕跡の発見が期待されています.
Mars 2020ミッションの重要なテーマの一つが「火星からのサンプルリターン」です.Perseveranceそのものは地球への帰還機構を備え付けていませんが, 2024年以降に送り込まれる予定のExoMars Roverと協力することで火星土壌サンプルを地球へ持ち帰ることを計画しています.Perseveranceは土壌を専用のサンプルに収納し,火星表面に置いておきます.ExoMars Roverがそのサンプルを拾い上げ地球に戻ります.すでにいくつかのサンプル採取に成功しています.
Mars 2020のもう1つの重要なミッションがヘリコプタIngenuityによる火星での動力飛行実証実験です.地球以外の天体での動力飛行は行われたことがなく,Ingenuityがはじめてです.すでに10回以上の飛行に成功しています.
祝融(CNSA;2021~)
- ミッション名:天問1号
- サイズ:-
- 質量:-
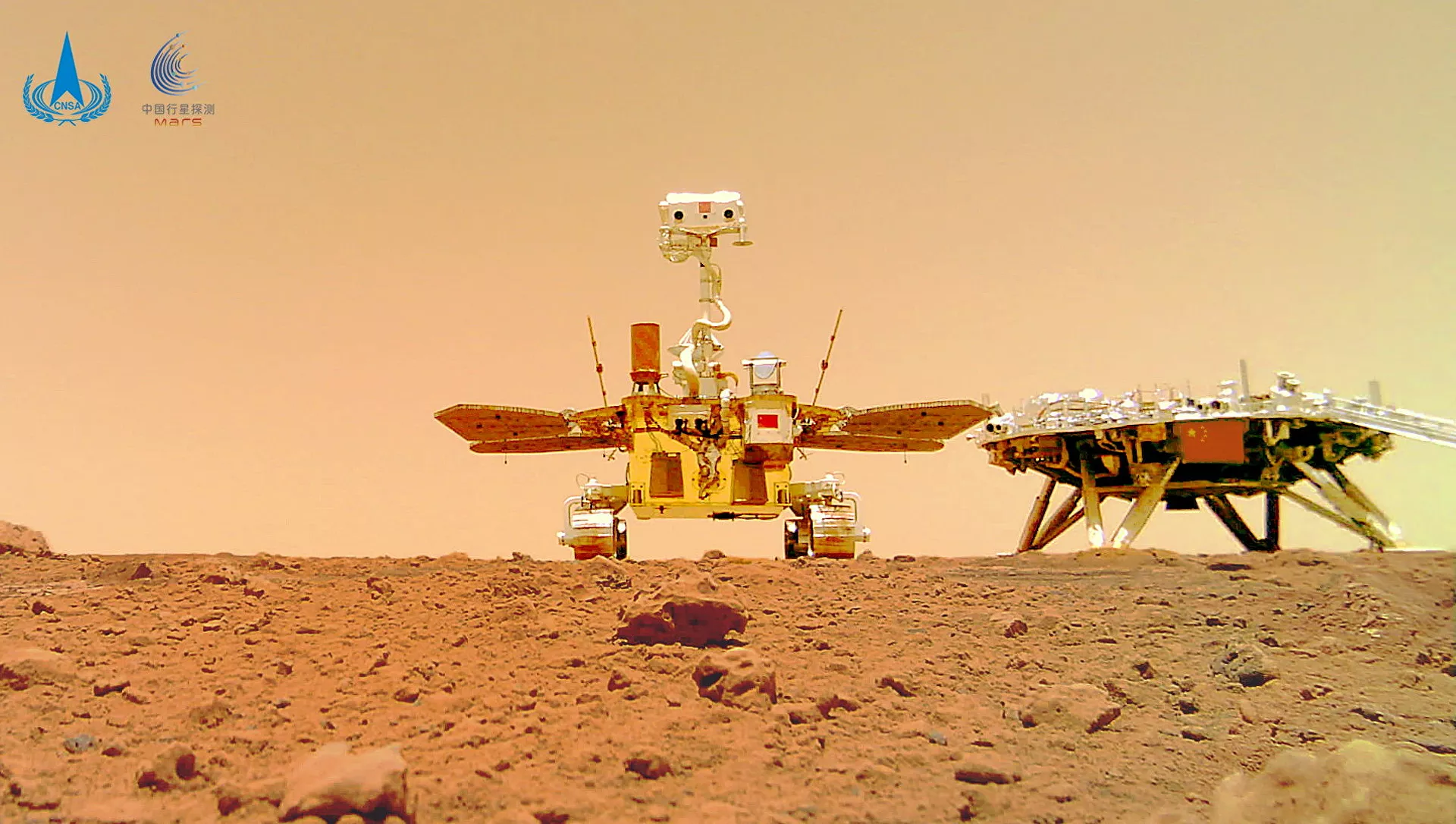
祝融(左)とランダ(右)(Image Credit:CNSA)
Perseveranceから遅れること3か月,2021年5月に中国の探査機祝融が火星着陸に成功しました.中国にとっては初の火星探査で周回軌道投入,着陸,走行に成功したことになり,一度にこの3つを達成したのは世界で初めてです.
これからの火星探査ローバ
先ほど述べたように火星はハビタブルな天体ということもあり,探査対象として注目度も非常に高まっています.今後もより一層,探査が活発化してと考えられます.
火星探査でキーポイントとなるのは,やはり「生命の痕跡」です.水が存在しているとされる場所は生命が存在していた可能性が非常に高いため,月同様,極域や崖といった地形が有力な探査候補地点となります.
また火星圏からサンプルを持ち帰ったこともないのでサンプルリターンも当分の目標になるでしょう.
ここでは現在開発・研究中の探査ローバについて紹介いたします.
Axelローバ(NASA)
Perseveranceのような大型ローバが探査できない地形を探査するために,NASA/JPLはテザー機構を持つローバDuAxelを開発しています.
DuAxelローバは前後で2つ分裂することができます.分割した2つはテザーで繋がれているため,片方が崖の上で支えとなり,もう一方は崖を懸垂下降するような移動を行うことが可能です.観測機器を搭載することもできるため,崖の地層を分析するといったことも可能です.
移動の際テザーが突起物に引っ掛からないような経路を探索する研究も行われており,テザーが絡まってしまう心配はなさそうです.
Rosalind Franklin(ESA)
(執筆中)
小惑星
月・火星では多くのローバが活躍してきましたが, それら以外の天体ではローバによる探査はほとんど行われておらず, ただ一つ,小惑星リュウグウだけで行われました.
MINERVA, MINERVA-II(JAXA/ISAS)
- ミッション名:はやぶさ,はやぶさ2
皆さんもちろん「はやぶさ」,「はやぶさ2」はご存じかと思いますが,それぞれ探査ローバを搭載していたのはご存じですか?「はやぶさ」ではMINERVAが,「はやぶさ2」ではMINERVA-IIが搭載されていました.
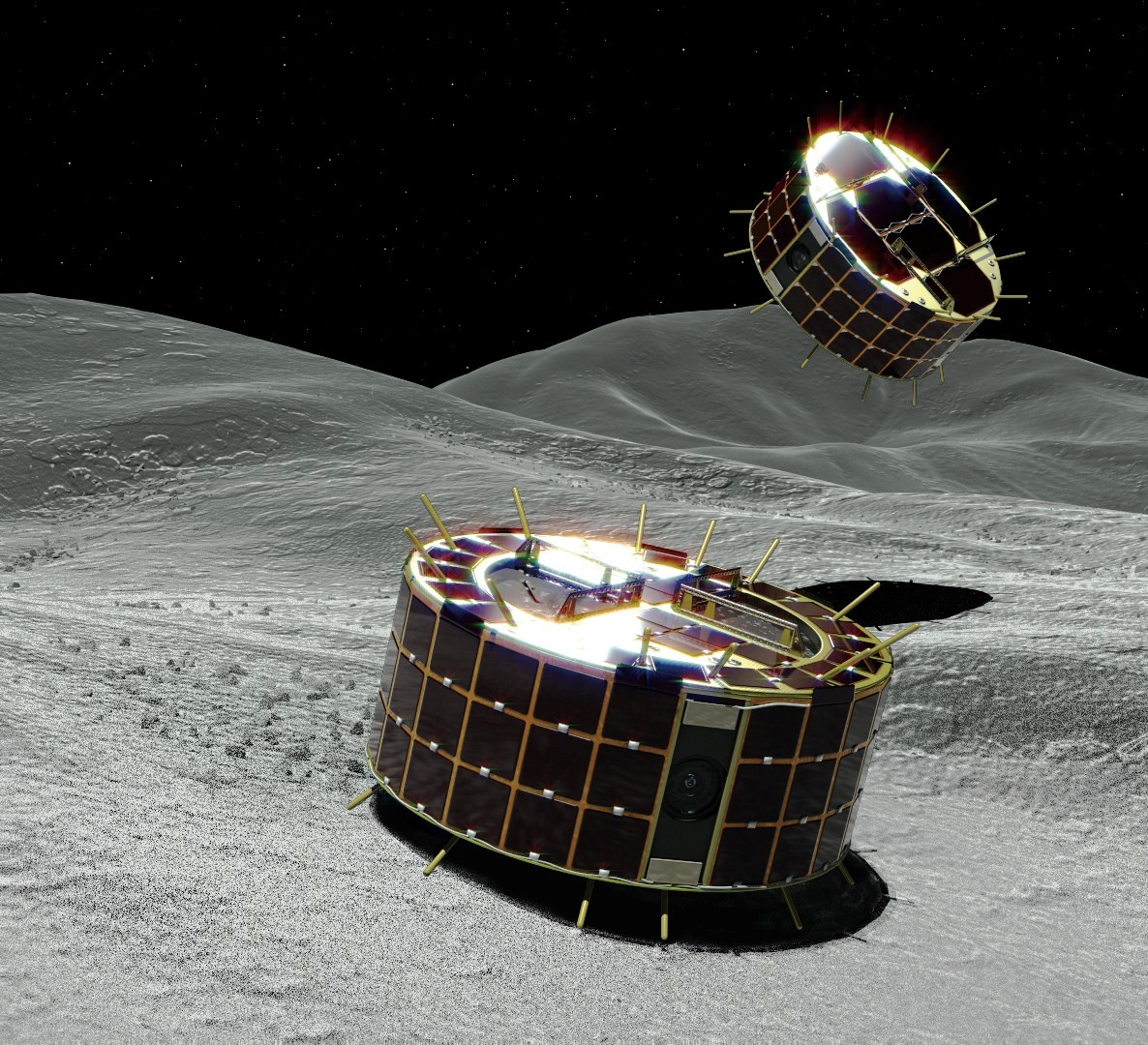
MINERVA(Image Credit:JAXA)
MINERVAは小惑星イトカワの近くで投下されましたが,放出ポイントが高かったため残念ながらイトカワに着陸することができませんでした.MINERVAそのものは正常に動作していたため,放出直後に撮影した写真を親機「はやぶさ」経由で地球へ送信することができました.
初号機の屈辱を果たすべく「はやぶさ2」ではMINERVA-IIが搭載されました.MINERVA-IIはMINERVA-II Rover1A/BとMINERVA-II Rover2の2機に分かれています. まずはじめにMINERVA-II Rover1A/Bが放出されリュウグウに無事着陸しました.
MINERVA-IIはローバなので当然のことながら移動機構を持っていますが,これまでの月・火星探査ローバとは違ったメカニズムを持ちます.
小惑星では重力が極めて小さいため,移動の際に地面を蹴ると反作用により中に浮いてしまいます.そのため車輪で移動することはできません.
代わりに提案された手法が,トルクによるホッピング機構です.ローバ内部に小型モータを入れ,移動したいときにほんの少しモータを回転させます.
その結果,ローバ本体が逆向きに回転しようし,モータを回転させた方向へホッピングしながら移動することができます.
モータを回す向きを変えることで移動する向きを調整することが可能です.
以上のようなホッピング機構を用いてリュウグウを移動し,様々な地点での温度や画像データの取得に成功しました.小惑星へ着陸し移動に成功したのはMINERVA-II Rover1A/Bが初めてです.

MINERVA-II Rover1Bが撮影したリュウグウ表面の画像
MINERVA-II2は電源関係でトラブルが生じてしまい,残念ながらリュウグウへの投下はされませんでした.代わりに,リュウグウの周回軌道に投入し,リュウグウの重力場の観測に用いられました.ちなみに,小天体を周回する人工衛星を実現したことも世界初です.
最後に
以上,月・火星・小惑星で活躍してきたローバを紹介してきました.今後のローバはPerseveranceのような大型ローバだけではなく,特異な探査環境に適した特殊なローバも探査で活躍していくと思います.新たなローバが宇宙探査の担い手となり,惑星・小惑星の未知を解明していく様子を見守っていきしょう.
また宇宙科学研究所ではローバの研究を行っている研究室もあります.宇宙探査やロボティクスに興味のある方はぜひお越しください.
脚注
-
厳密にいえばこれら以外に「サンプルリターン」と「有人探査」がありますが,それらはオービタやランダ,ローバを組み合わせることで行われることが多いので,ここでは割愛します. ↩
-
Region of Interests ↩
-
生命が存在する3条件は「適度な温度」,「気体(酸素)の大気が存在する」,「水の存在」と考えられています. ↩
-
冬の間は太陽電池の発電量が多い場所へ移動しますが,Spiritは砂地に足を取られてしまっていたため,エネルギーを確保できる地点へ移動することができませんでした. ↩
-
10年以上にわたって火星で活動していたことで太陽電池パネルに砂が降り積もり,発電量が低下したと考えられています. ↩
